Innere Orientierung
Kammerkonstante (Brennweite)
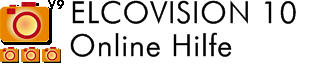
Die Kammerkonstante ist der Abstand des Brennpunktes eines Objektives zum Bildsensor:
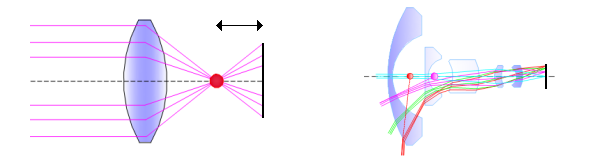
Im Brennpunkt bündeln sich alle Lichtstrahlen. Viele Objektivtypen haben 2 Kammerkonstanten, weil sich die Lichtstrahlen auf einer Linie bündeln, die Kammerkonstanten sind dann der vordere und hintere Punkt dieser Linie
Bildkoordinatensystem
Das ELCOVISION 10 Bildkoordinatensystem ist ein rechtshändiges kartesisches Koordinatensystem und wird durch die Abmaße des Bildsensors oder die Réseaugitterplatte oder durch Rahmenmarken in der Kamera definiert. Die Einheit ist mm. Die Messungen im Bild werden auf dieses System umgerechnet (Bildkoordinaten) und damit normiert und damit werden Bildmessungen über verschiedene Kameramodelle hinweg vergleichbar.
Der 0,0 Punkt des Bildkoordinatensystems ist genau in der Bildmitte:

Pixelkoordinatensystem
Das Pixelkoordinatensystem ist ein linkshändiges kartesisches Koordinatensystem und wird durch die Pixelauflösung des Bildes definiert. Die Einheit ist Pixel.
Der 0,0 Punkt des Pixelkoordinatensystem ist die linke obere Ecke des linken oberen Pixel:

Hauptpunktlage Xh, Yh
Die Hauptpunktlage xH und yH sind die Koordinaten des Bildhauptpunktes in mm. Bei hochwertigen Kamera / Objektivkombinationen ist die Hauptpunktlage normalerweise sehr nahe am Nullpunkt des Bildkoordinatensystems, meist innerhalb 0.1mm oder weniger. Bei billigen Kameras kann der Bildhauptpunkt durchaus weitab des Bildmittelpunktes liegen.
ELCOVISION 10 Kameramodelle
Einfache Lochkamera mit einfacher radialer Verzeichnung
Ein einfaches Kameramodell mit 1 Parameter für die Radiale Verzeichnung. Nur für sehr leicht verzeichnende Objektive geeignet
| Kammerkonstante | 1 Parameter: c |
| Hauptpunktlage | 2 Parameter: Xh, Yh |
| Radiale Verzeichnung: | 1 Parameter: R1 |
Einfaches Fischaugen Kameramodell
Ein einfachstes Kameramodell ohne Verzeichnungsparameter. Nur geeignet für „optimale“ Fischaugenobjektive ohne zusätzliche Verzeichnung.
| Kammerkonstante | 1 Parameter: c |
| Hauptpunktlage | 2 Parameter: Xh, Yh |
| Radiale Verzeichnung: | 1 Parameter: R1 |
Lochkamera mit Radialer Verzeichnung
Ein Kameramodel mit Parametern für Radiale Verzeichnung. Für leicht Verzeichnende Objektive geeignet; führt zu guten Genauigkeiten. Ist nicht für Fischaugenobjektive geeignet.
| Kammerkonstante | 1 Parameter: c |
| Hauptpunktlage | 2 Parameter: Xh, Yh |
| Radiale Verzeichnung: | 2 Parameter: R1, R2 |
Fischaugen Kameramodell
Ein einfaches Kameramodell für Fischaugenobjektive
| Kammerkonstante | 1 Parameter: c |
| Hauptpunktlage | 2 Parameter: Xh, Yh |
| Radiale Verzeichnung: | 2 Parameter: R1, R2 |
Lochkamera mit Radialer und Tangentialer Verzeichnung
Ein Kameramodel mit Parametern für Radiale und Tangentiale Verzeichnung. Für normale auch stärker verzeichnende Objektive geeignet, führt zu sehr guten Genauigkeiten. Ist nicht für Fischaugenobjektive geeignet.
| Kammerkonstante | 2 Parameter: c, c1 |
| Hauptpunktlage | 2 Parameter: Xh, Yh |
| Radiale Verzeichnung: | 2 Parameter: R1, R2 |
| Tangentiale Verzeichnung | 2 Parameter: T1, T2 |
Lochkamera / Fisheye Kameramodell mit Radialer und Tangentialer Verzeichnung
Ein Kameramodell für fast alle Arten von Objektiven. Fährt zu guten Resultaten. Benötigt mindestens 15 Bildmessungen pro kalibriertes Bild für gute Ergebnisse.
| Kammerkonstante | 2 Parameter: c, c1 |
| Hauptpunktlage | 2 Parameter: Xh, Yh |
| Radiale Verzeichnung: | 6 Parameter: R1 - R6 |
| Tangentiale Verzeichnung | 2 Parameter: T1, T2 |
Fischaugen Kameramodell für flache Fischaugenobjektive
Ein Kameramodell mit zusätzlichen Parametern um die Verzeichnungen von flachen Fischaugenobjektiven zu kompensieren.
| Kammerkonstante | 2 Parameter: c, c1 |
| Hauptpunktlage | 2 Parameter: Xh, Yh |
| Radiale Verzeichnung: | 6 Parameter: R1 - R6 |
| Tangentiale Verzeichnung | 2 Parameter: T1, T2 |
Leica BLK Kameramodell
Ein Kameramodell für die Leica BLK Instrumente. Ebenfalls gut für andere stark verzeichnende Objektive geeignet
| Kammerkonstante | 2 Parameter: c, c1 |
| Hauptpunktlage | 2 Parameter: Xh, Yh |
| Radiale Verzeichnung: | 3 Parameter: R1, R2, R3 |
| Tangentiale Verzeichnung | 2 Parameter: T1, T2 |