Schalten Sie in der Kamera das automatische Hoch-Querausrichten der Bilder aus.Damit wird die sogenannte Hauptpunktlage nicht mehr verändert und Sie werden eine bessere Genauigkeit erhalten da die Kamerakalibrierung besser wird.
Schalten Sie in der Kamera die automatische Verwackelungskorrektur aus. Diese verhindert eine genaue Kalibrierung der Kamera während der Berechnung oder die richtige Anwendung der Kalibrierdaten falls die Kamera schon kalibriert ist.
Verwenden Sie am besten Festbrennweitenobjektive. Diese sind immer lichtstärker als Zoom Objektive und Sie erhalten bessere Bilder, speziell bei schlechten Lichtverhältnissen.
Wenn Sie Zoomobjektive verwenden: Stellen Sie das Objektiv entweder auf Anschlag voll Weitwinkel, oder Anschlag voll Zoom und verändern Sie diese Zoomeinstellung nach Möglichkeit nicht mehr. Die Einstellung voller Weitwinkel ist normalerweise immer gut Verwendbar.
Vor dem Fotografieren
Stellen Sie Blende, Belichtung und ISO Zahl richtig ein: Die Blende so hoch wie möglich damit Sie gut ausgeleuchtete, scharfe und rauschfreie Bilder haben, bei Freihandfotografie sollte die Belichtungszeit nicht grösser als 1/60s sein, da sonst die Bilder verwackeln können
Fokussieren Sie einmal vor dem fotografieren und schalten Sie den Autofokus aus. Dadurch können alle Bilder mit demselben mathematischen Kameramodell gerechnet werden und die Genauigkeit steigt.
Während des Fotografierens
Zoomen und fokussieren Sie nicht: Dadurch können alle Bilder mit demselben Kameramodell gerechnet werden, ansonsten muss ELCOVISION 10 jedes Bild für sich kalibrieren was die Genauigkeit senken wird.
Machen Sie nie 2 Bilder von genau dem Selben Standpunkt. Gehen Sie zwischen 2 Bildern immer wenigstens einen halben Schritt zur Seite: Bilder vom Selben Standpunkt können wegen des flachen Strahlenschnitts keine genauen Punkte erzeugen.
Fotografieren Sie das Objekt mit 75% Überlappung zwischen jeweils 2 Bildern ab: Bei einer Flugplanungssoftware für Drohnen stellen Sie am besten eine 75% Überlappung zwischen den Bildern und eine 60% - 75% Überlappung der Streifen ein.
Fotografieren Sie speziell große Objekte wenn möglich in 2 Durchgängen ab: Beim ersten Durchgang fotografieren Sie es einfach flächendeckend ab, im 2. Durchgang fotografieren Sie alle Details die Sie noch besonders interessieren. Dadurch wird vermieden dass Sie versehentlich Teile des Objektes vergessen: Werden Details gleich im 1. Durchgang mitfotografiert verzettelt man sich gerne und Sie haben oftmals Löcher im Bildverband.
Warum muss der Autofokus deaktiviert werden bzw. darf während der Bildaufnahme nicht fokussiert werden?
Während der automatischen Orientierung kalibriert ELCOVISION 10 verschiedene Kameraparameter, darunter insbesondere:
die Kamerakonstante (Brennweite)
die Hauptpunktlage sowie
die Parameter für radiale und tangentiale Verzeichnung.
Von zentraler Bedeutung ist dabei die präzise Bestimmung der Kamerakonstante (Brennweite) des Objektivs. ELCOVISION 10 ermittelt diesen Wert üblicherweise mit einer Genauigkeit von 0.005 mm oder besser.
Ist der Autofokus aktiviert oder wird manuell während der Aufnahme auf unterschiedliche Distanzen fokussiert, verändert sich die effektive Brennweite in Abhängigkeit zur Fokussierdistanz: Beim Fokussieren auf nahe Objekte verlängert sich die Brennweite, bei weiter entfernten Objekten verkürzt sie sich. Diese Abweichungen können im Bereich mehrerer Millimeter liegen – und damit um viele Größenordnungen höher als die durch Kalibrierung erzielbare Genauigkeit.
Wenn bei der automatischen Orientierung Bilder der selben Kamera mit variierenden Brennweiten verwendet werden nimmt ELCOVISION 10 normalerweise an, dass alle Aufnahmen mit derselben Brennweite entstanden sind. Dies führt dazu, dass die Berechnung des Bildverbandes durch systematische Fehler belastet wird: Die falschen Brennweiten erzeugen einen inneren Zwang im Modell, was zu deutlich verringerten Punktgenauigkeiten führt.
Eine individuelle Kalibrierung jedes einzelnen Bildes ist ebenfalls keine praktikable Lösung, da dadurch die sogenannte Überbestimmung verloren geht – ein essenzieller Aspekt für hohe Genauigkeit.
ELCOVISION 10 kann im Rahmen der globalen Orientierung zwar eine Autofokuskompensation durchführen. Dies verbessert die Ergebnisse deutlich, erreicht aber dennoch nicht die Genauigkeit, die bei deaktiviertem Autofokus erzielt werden kann.
Belichtungsmessung
Alle aktuellen digitalen Kameras sind mit sehr guten Automatiken ausgestattet, die bei fast allen Beleuchtungsverhältnissen ausgezeichnete Bilder machen. Trotzdem sollte man einige Grundkenntnisse über die richtige Belichtung von Bildern haben:
Die Selektivmessung (Spotmessung) misst die Lichtverhältnisse in der Mitte des Abbildungsbereiches; die Großfeld- Integralmessung (Mulitspotmessung) misst die Lichtverhältnisse im gesamten Abbildungsbereich.
Die Selektivmessung der Belichtung ist dann sinnvoll, wenn der für die Auswertung interessante Bereich eines Objektes stark verschiedene Beleuchtungsverhältnisse zur Umgebung aufweist.
Herrschen in einer bestimmten Situation nicht zu große Unterschiede in den Beleuchtungsverhältnissen und ist die gesamte Situation für die Auswertung von Interesse, so muss die Integralmessung zur Belichtungsmessung herangezogen werden. Somit wird der gesamte Objektbereich bestmöglich abgebildet.
Wichtig ist, dass ein überstrahltes d.h. zu helles Bild, nicht mehr gerettet werden kann: Bildbereiche die überstrahlt sind sind unwiderruflich verloren, es kann keine Bildinformation wiederhergestellt werden:
Aus einem unterbelichteten, d.h. zu dunklem Bild, kann durch simples Aufhellen oder Gammakorrektur noch jede Menge Information gewonnen werden, es kann fast vollständig korrigiert und ganz normal verwendet werden:
Bei der automatischen Orientierung wendet ELCOVISION 10 automatisch verschiedene Korrekturverfahren an um die Bilder trotzdem zu orientieren. Daher funktionieren auch leicht unterbelichtete Bilder sehr gut, während überbelichtete Bilder zu Problemen führen können.
Blendenwahl
Da in der Nahbereichsphotogrammetrie normalerweise mit gerasteten Objektiven oder mit auf bestimmte Entfernungen fokussierten Objektiven gearbeitet wird, muss die Schärfe des Bildes über die Blendenwahl erreicht werden. Es wird also immer angestrebt, mit einer möglichst kleinen Blende zu arbeiten. Optimale Blenden sind normalerweise im Bereich 5.6 – 11 wird die Blendenzahl grösser werden die Belichtungszeiten zu groß oder die Bilder zu dunkel.
Doch Vorsicht: Bei Freihandaufnahmen sollte die Belichtungszeit nicht länger als eine 1/60 Sekunde sein (Verwacklungsgefahr). Bei Benutzung eines Teleobjektivs muss die längste Belichtungszeit sogar bei einer 1/125 Sekunde oder weniger liegen.
Beleuchtung
Die Ausleuchtung mittels Lampen ist immer dann sinnvoll, wenn mit Schlagschatten zu rechnen ist oder starke Reflexionen vom Objekt zu erwarten sind. Mit Reflexionen muss besonders bei der Aufnahme von Fabrikhallen, Rohrleitungen etc. gerechnet werden.
Schlagschatten treten in Innenräumen oder bei stark strukturierten Objekten auf. Wird in solchen Fällen mit Lampen gearbeitet, so können Sichtschatten durch das Versetzen der Lampen beseitigt werden.
Das beste natürliche Licht im freien hat man wenn der Himmel geschlossen leicht bewölkt ist. In diesem Fall treten keine Schlagschatten auf, das gesamte Objekt ist meist gleichförmig ausgeleuchtet:
Durch Bewölkung sanftes Licht und keine harten SchattenStrahlender Sonnenschein sorgt für harte Schatten
Aufnahmeanordnungen für die 3D-Photogrammetrie
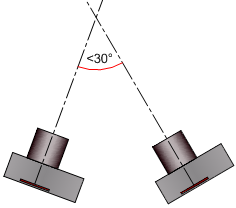
Bei Aufnahmen für die Automatische Orientierung sollen die Konvergenzwinkel zwischen 2 Bildern 30° nicht überschreiten, werden die Bilder manuell orientiert sollte, damit man Punkte trotzdem noch gut erkennen kann, der Konvergenzwinkel auf 90° beschränkt werden.
Punkte, die dreidimensional (X-, Y-, Z- Koordinate) bestimmt werden sollen, müssen in wenigstens 2, besser 3 oder 4, Bildern aus verschiedenen Standpunkten sichtbar sein. Das bedeutet ca. 75% Bildüberlappung oder idealerweise mehr zwischen 2 aufeinanderfolgenden Bildern.
Die Photos sollten möglichst formatfüllend gemacht werden, damit nicht über den Bildmaßstab Genauigkeit verschenkt wird. Wiese, Bäume oder blauer Himmel interessieren in den meisten Fällen nicht.
Oftmals ist es trotz der Genauigkeitsüberlegungen sinnvoll, näher an das Objekt heranzugehen als notwendig, Die Erkennbarkeit der Objektdetails wird dadurch erheblich verbessert, die Auswertung kann deutlich detaillierter erfolgen.
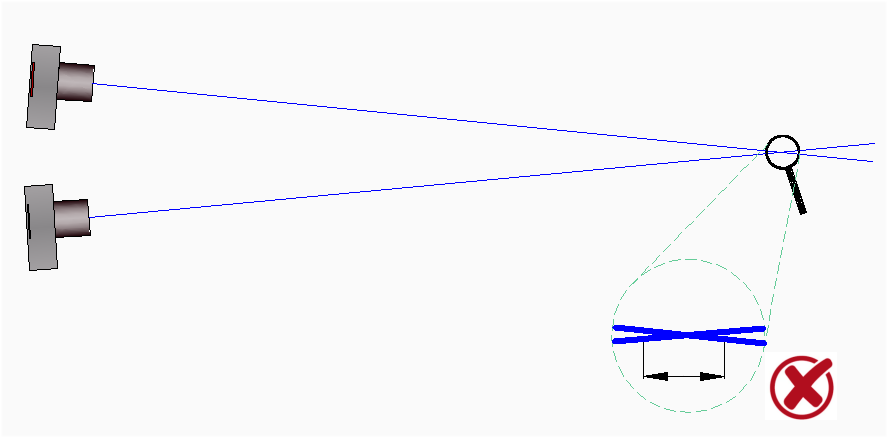
Von äußerster Wichtigkeit ist dass die Bilder von verschiedenen Standpunkten gemacht werden! Bilder vom nahezu demselben Standpunkt sind wegen des resultierenden sehr flachen Strahlenschnittes unbrauchbar und führen zu schlechten Messgenauigkeiten!
Ein zu flacher, schleifender Strahlenschnitt führt zu schlechten Messgenauigkeiten in die Tiefe d.h. in die Blickrichtung, die Messgenauigkeit parallel zur Bildebenen ist meistens jedoch gut:
Schleifender Strahlenschnitt: Schlechte Genauigkeit in Blickrichtung
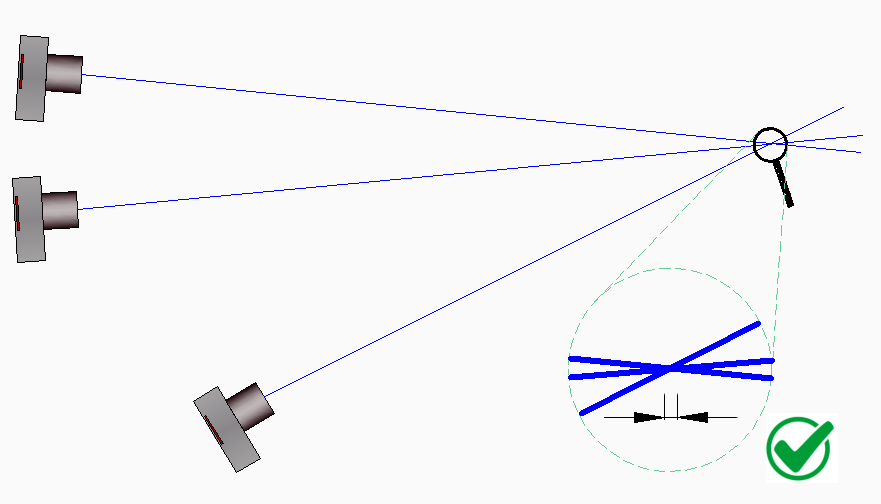
Durch ein 3. Bild von einem entfernteren Standpunkt wird die Messgenauigkeit des Objektpunktes deutlich erhöht:
Durch dritte Messung jetzt in allen Richtungen gute Genauigkeit.
Generelle Aufnahmeanordnungen
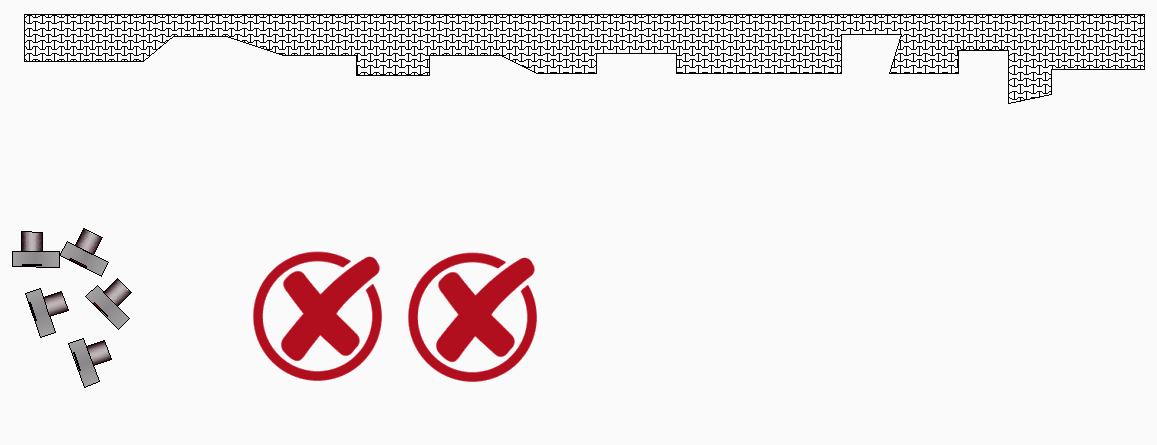
So sollte man es nicht machen, das Objekt wird praktisch nur von einem Standpunkt fotografiert, es entstehen fast nur schleifende Strahlenschnitte:
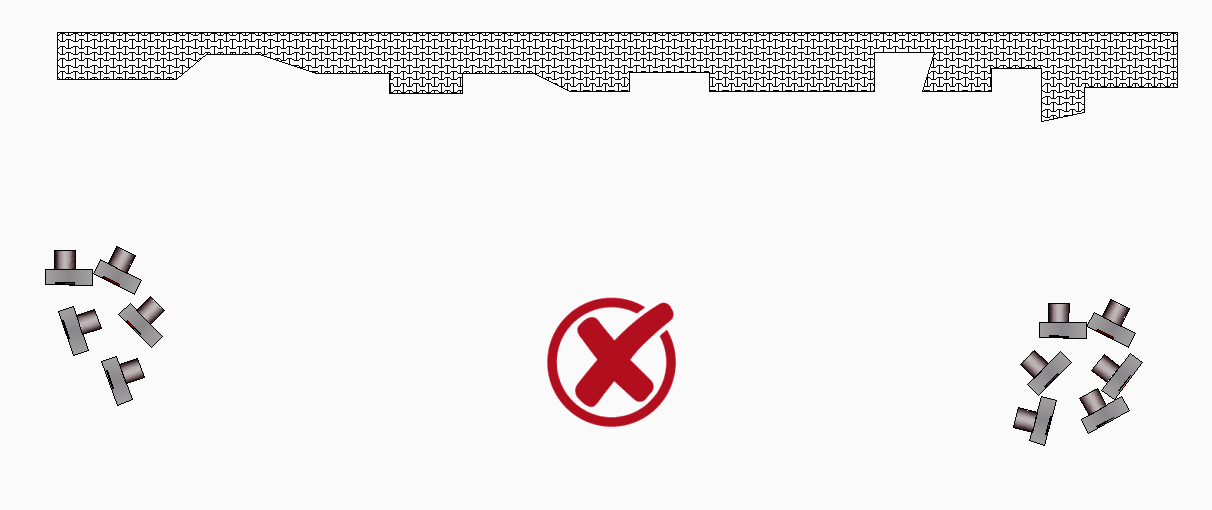
Etwas besser aber immer noch unbrauchbar ist folgende Aufnahmeanordnung, trotz der über 10 Bilder sind es effektiv nur 2 Standpunkte, die ebenfalls unter schleifenden Strahlenschnitten leiden.
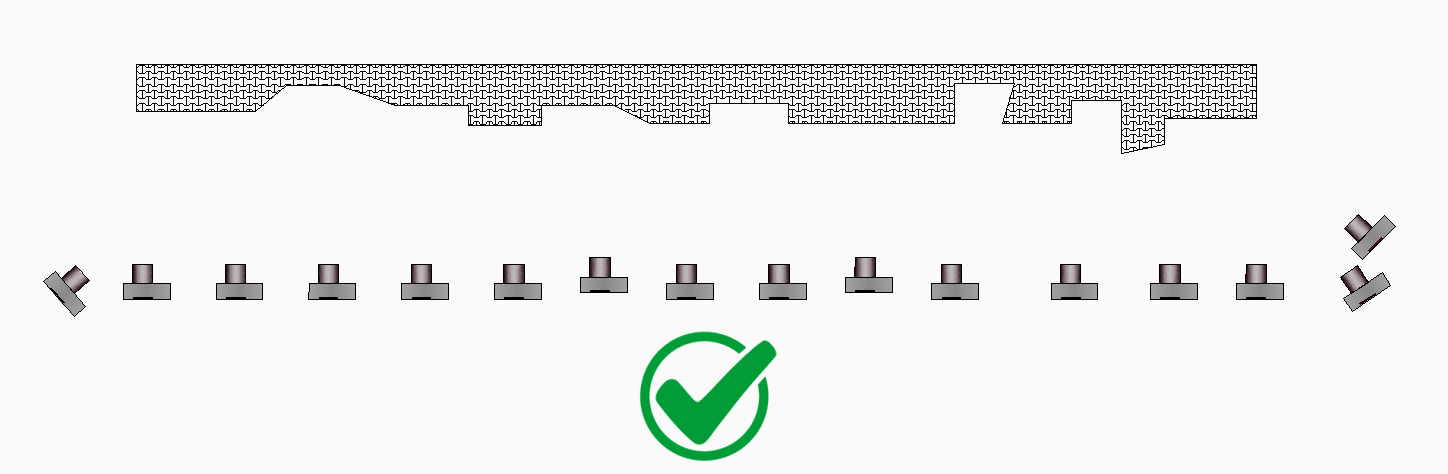
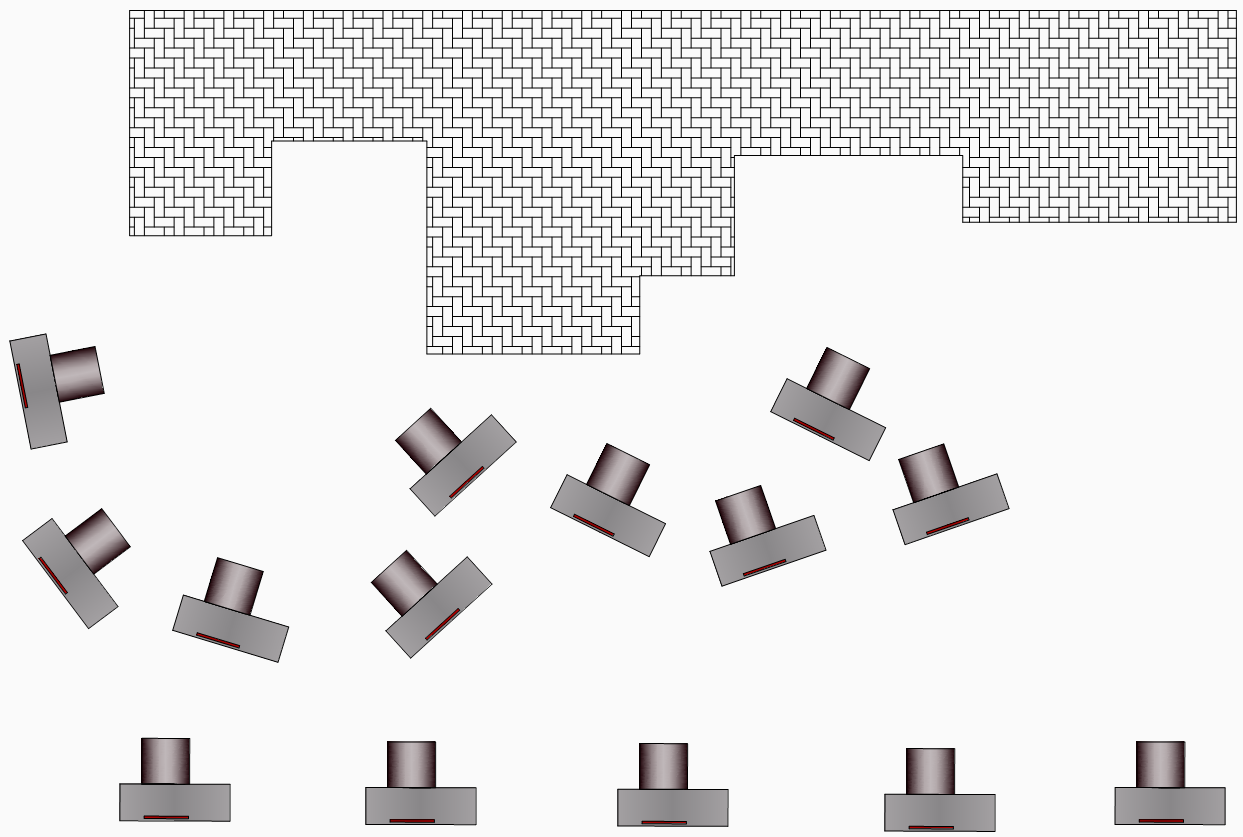
Sehr viel besser ist diese Aufnahmeanordnung, das Objekt ist flächendeckend abfotografiert, die gut separierten Standpunkte führen zu guten Genauigkeiten, da jeder Punkt am Objekt durch die große Bildüberlappung in vielen Bildern sichtbar ist:
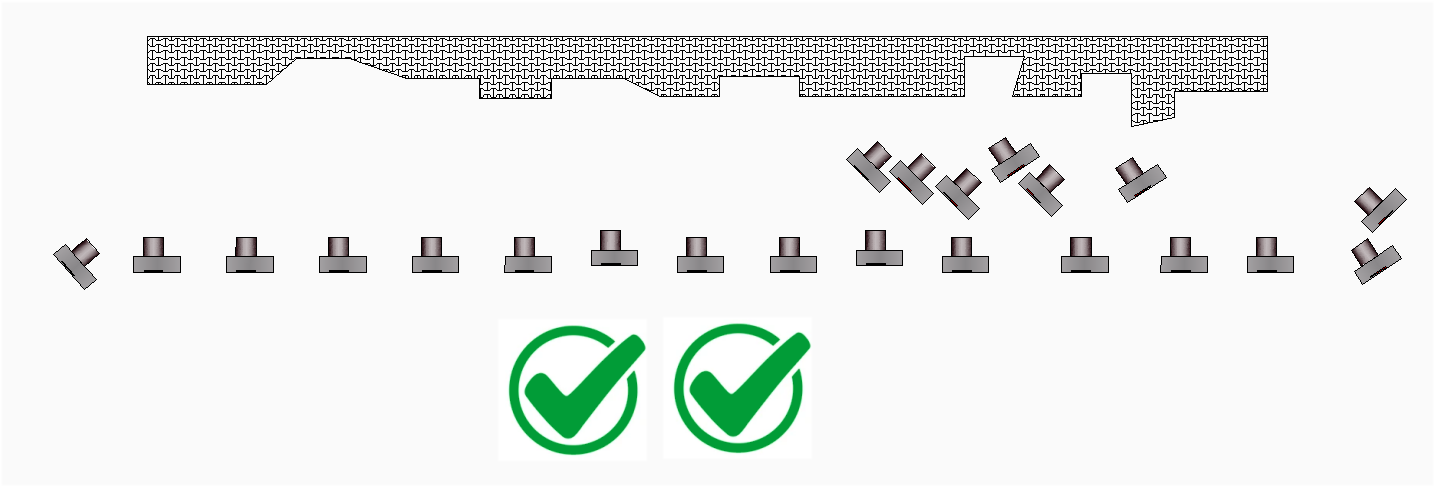
Es könnten aber in den Einbuchtungen noch Sichtschatten vorhanden sein in denen nicht gemessen werden kann, daher werden in einer noch besseren Aufnahmeanordnung noch zusätzliche Bilder gemacht:
Dabei wird darauf geachtet dass auch jeder Punkt in den Vertiefungen in mindestens 3 Bildern sichtbar ist.
Aufnahme stark strukturierter Objekte
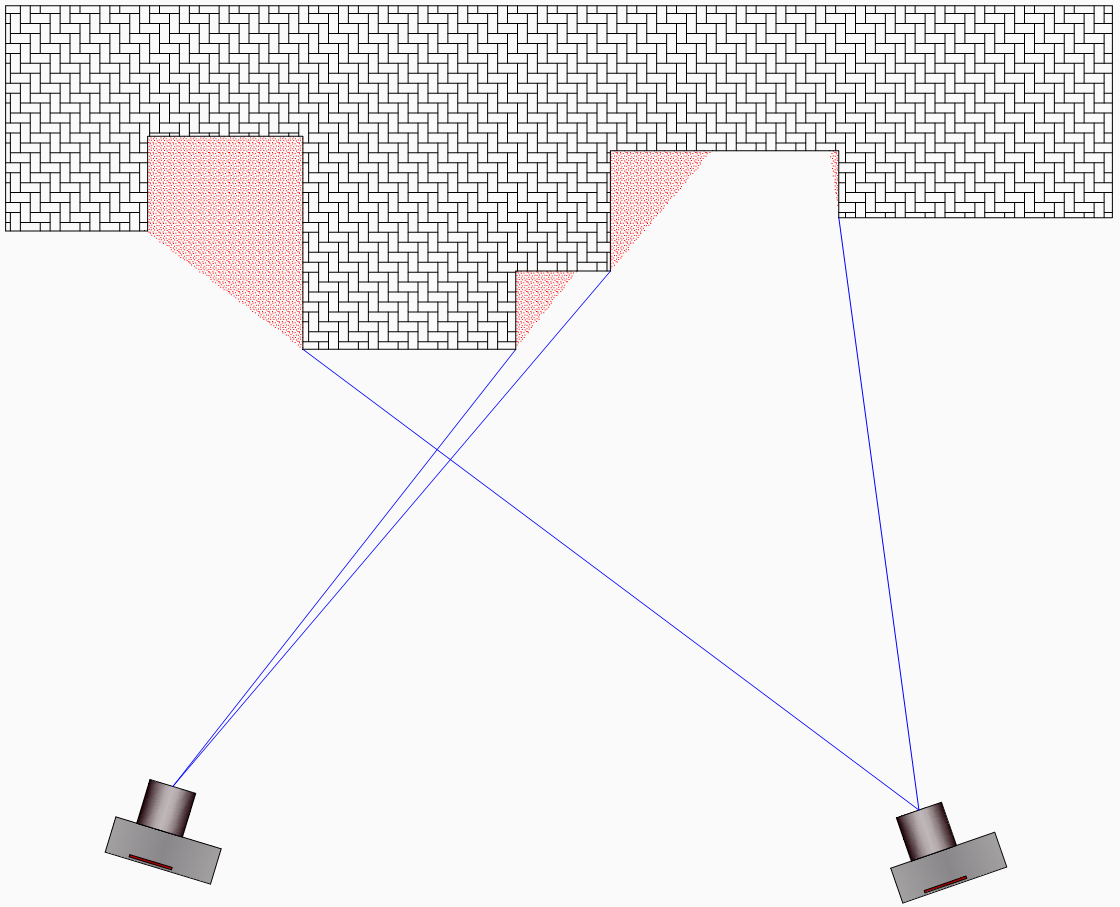
Stark Strukturierte Objekte und grosse Basisabstände führen oft zu Sichtschatten in denen nicht gemessen werden kann:
Rot: Sichtschatten der jeweiligen Standpunkte
Die Lösung hier ist entweder in die Höhe zu gehen oder besser mit einer weiter enfernten Reihe von Bilder das Objekt komplett abzudecken und dann zusätzlich die mutmasslich verdeckten Teile zusätzlich mit je 2-3 Bilder zu fotografieren:
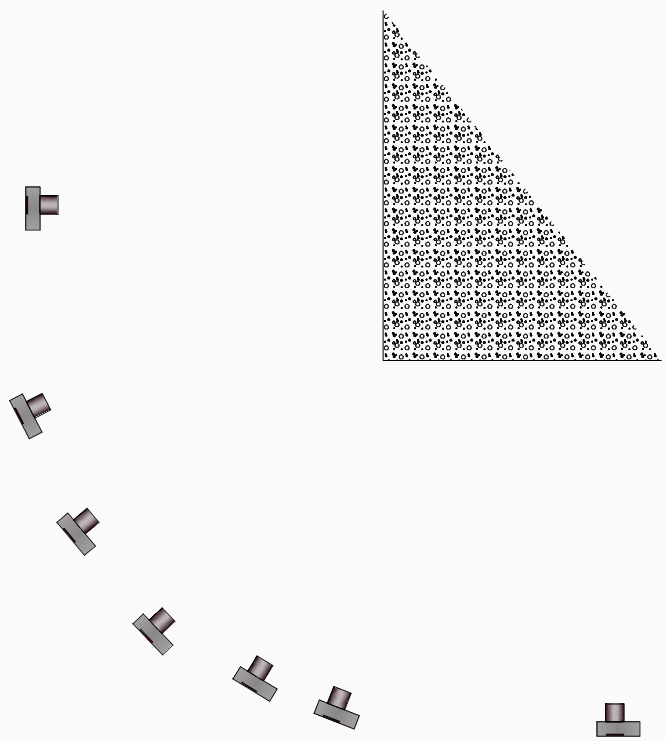
Aufnahme um eine Objektecke herum
Um Objektecken fotografiert man am besten mit 4-5 Bildern herum, dadurch wird der maximale Konvergenzwinkel von 30° für die automatische Orientierung eingehalten:
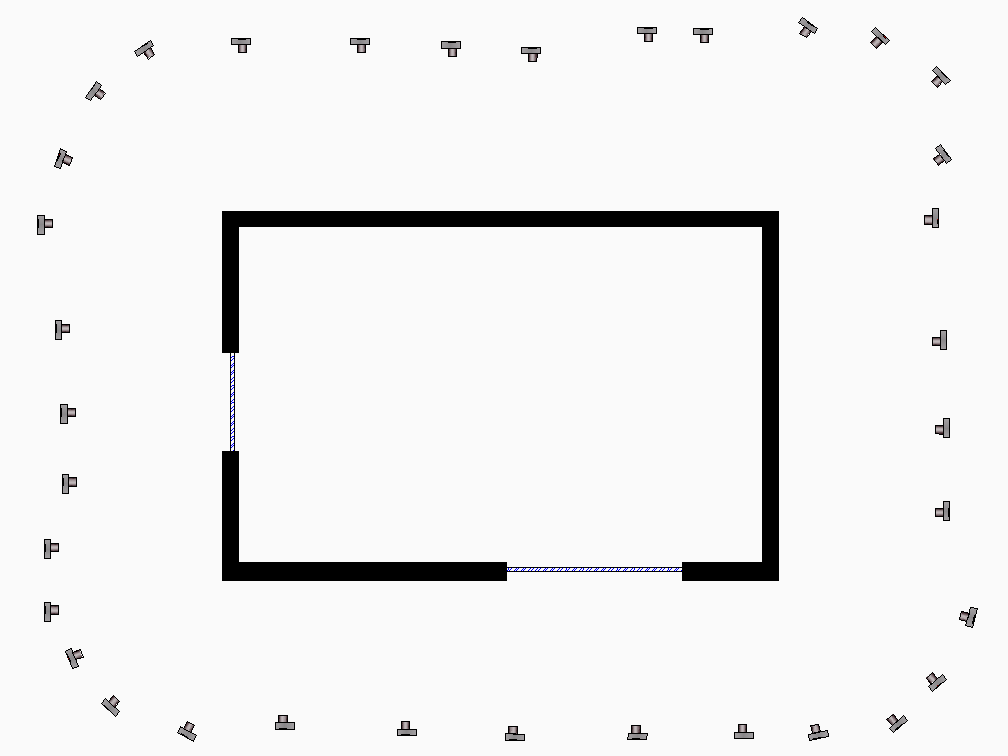
Aufnahme eines kleinen Gebäudes oder Objektes
Am besten geht man um das Objekt herum und macht alle 1-2 Schritte ein Bild, Details fotografiert man am besten mit einem 2. Durchgang:
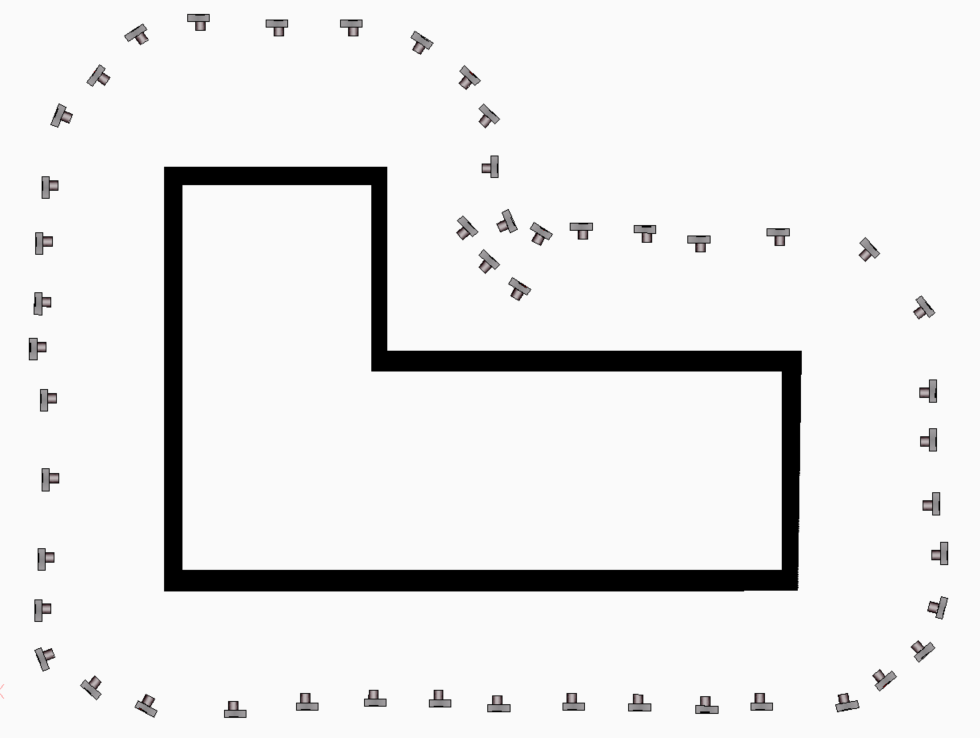
Gebäude mit Innenhof
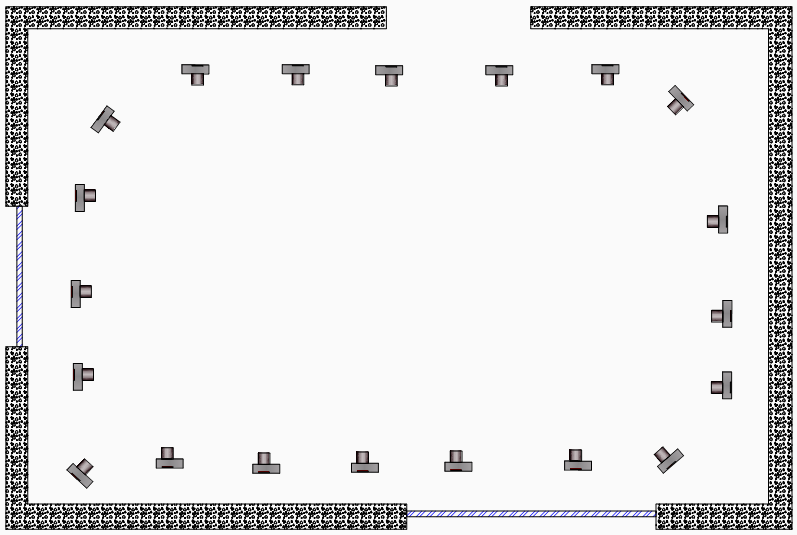
Aufnahme von Innenräumen
Bei der Aufnahme von Innenräumen hängt die Aufnahmeanordnung und auch die Anzahl der Bilder stark von der Einrichtung des Raumes ab. Dies liegt an den Verdeckungen, die durch im Raum stehende Möbelstücke verursacht werden. Am besten werden die Räume mit dem Rücken zur Wand fotografiert, je weitwinkliger das Objektiv ist umso besser:
und dann nachträglich werden dann so gut es geht Möbel und Sichtschatten mit zusätzlichen Bildern abgedeckt.
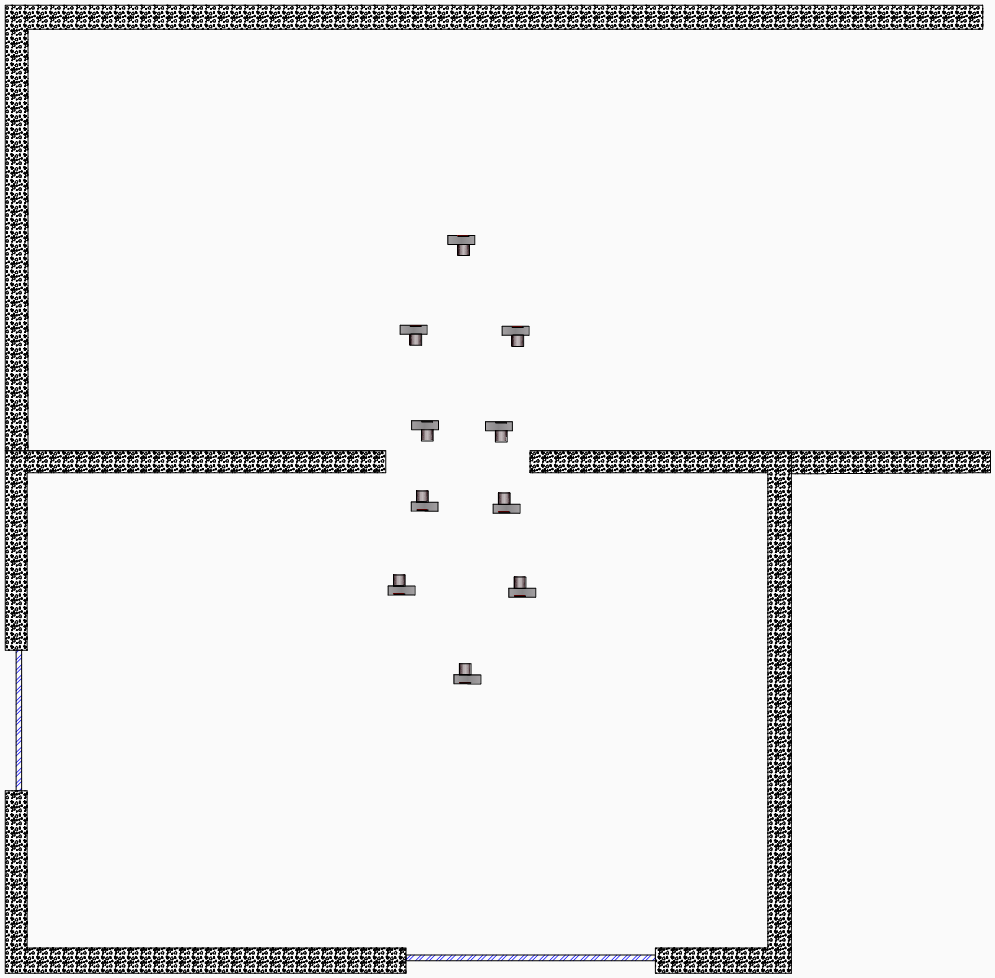
Durchgang in einen nächsten Raum
Durch Türen wird dann am besten mit paarweisen Bildern fotografiert, die jeweils gegenüberliegenden Wände liefern dann die Verknüpfungspunkte:
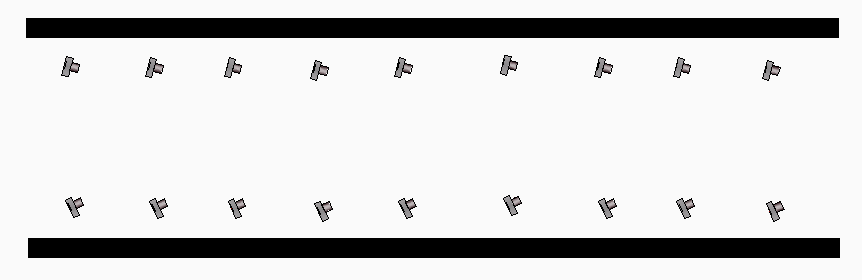
Aufnahme eines langen Ganges
Man macht am besten jeweils Stereo-Bildpaare die etwas auf die jeweils gegenüberliegende Wand ausgerichtet sind. Nach Möglichkeit sollte auch der Boden mit aufgenommen werden, da dort oftmals vielmehr Punkte für die Verknüpfung gefunden werden:
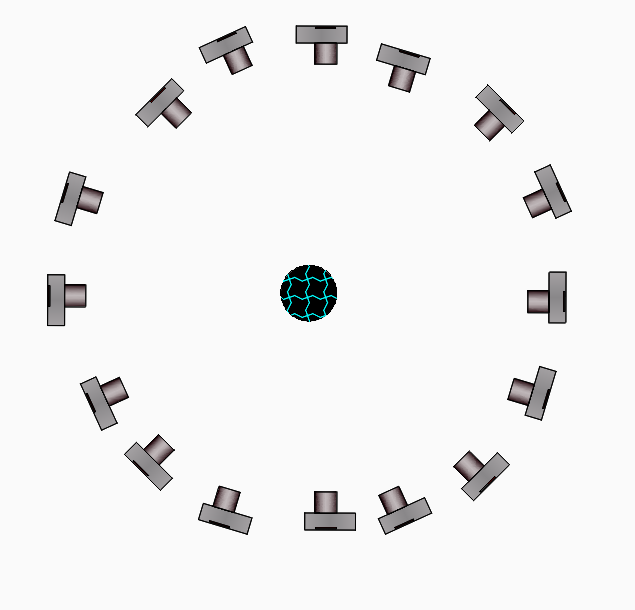
Aufnahme eines runden Objektes
Runde Objekte wie Bäume, Säulen usw. können wie folgt fotografiert werden:
Es ist der maximale Konvergenzwinkel von 30° zwischen 2 Bilder zu beachten, d.h. die minimale Anzahl Bilder ist 360°/30° = 12 Bilder. Sicherheitshalber sollte man ca. doppelt so viele Bilder machen.
Befliegungen: Mit Drohen, Flugzeugen, Hubschraubern ...
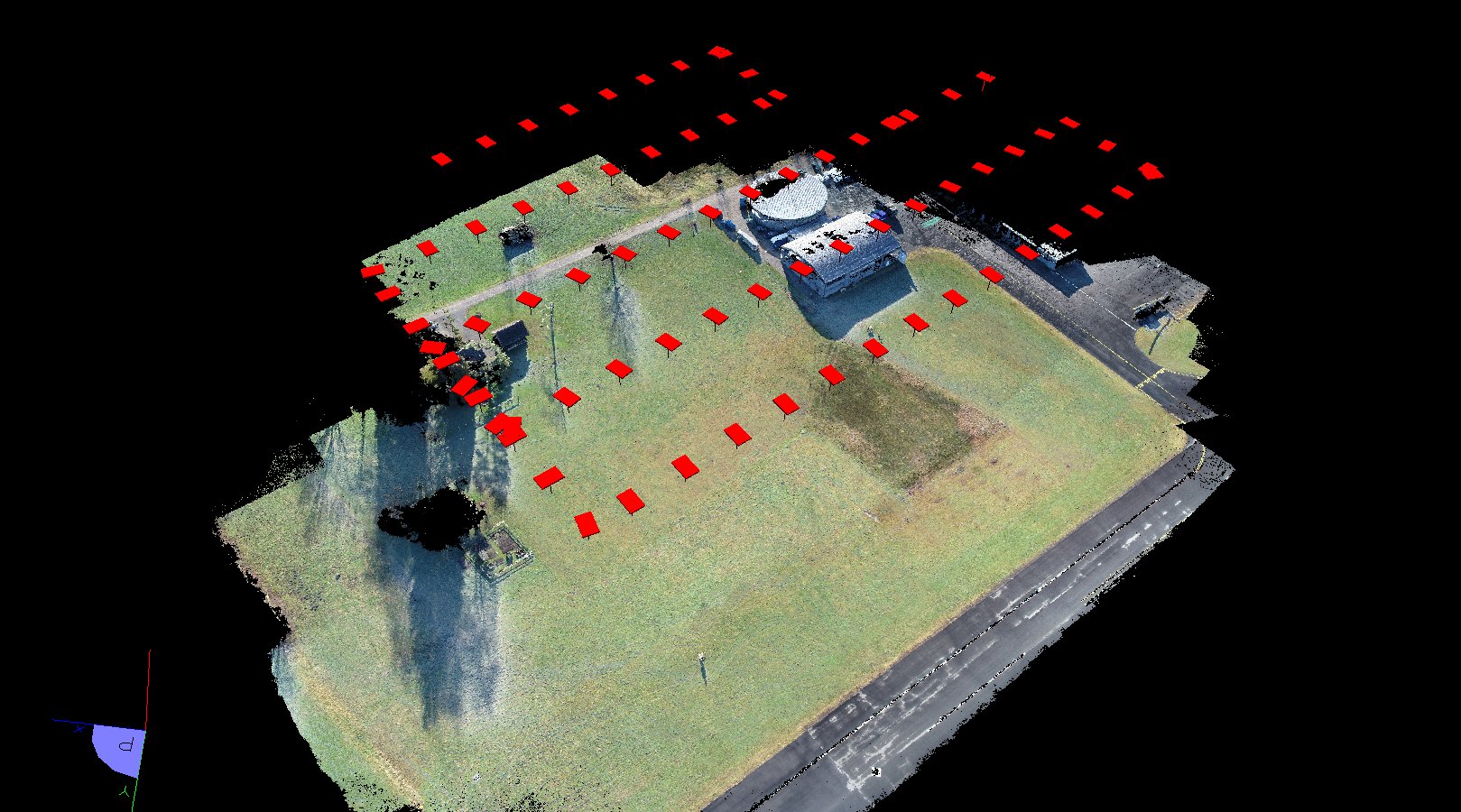
Das Objekt sollte in Streifen abgeflogen werden, die Bilder und Streifen sollen Sich dabei um 75% überlappen. Dadurch ist dann jeder Punkt am Boden in ca. 6 Bildern sichtbar: Die Orientierung des Bildverbandes wird sehr stabil werden und es kann dann eine sehr gute Hochdichte Punktwolke gerechnet werden, bei der jeder beliebige Punkt am Objekt in 4 oder mehr Bildern sichtbar sein sollte.
Weiteres ist besonderes Augenmerk auf die Tatsache zu richten dass sich Drohnen und Flugzeuge, Hubschrauber etc. während der Aufnahme weiterbewegen, d.h. auch die Kamera bewegt sich weiter.
Hier ist eine Tabelle die aufzeigt wie weit sich eine Kamera während der Aufnahme eines Bildes bei verschiedenen Fluggeschwindigkeiten und Belichtungszeiten weiterbewegt:
Fluggeschwindigkeit
1/60s
1/100s
1/125s
1/250s
1/500s
1/1000s
3,6 km/h = 1 m/s
1,67cm
1,00cm
0,80cm
0,40cm
0,20cm
0,10cm
7,2 km/h = 2 m/s
3,33cm
2,00cm
1,60cm
0,80cm
0,40cm
0,20cm
10,8 km/h = 3 m/s
5,00cm
3,00cm
2,40cm
1,20cm
0,60cm
0,30cm
14,4 km/h = 4 m/s
6,67cm
4,00cm
3,20cm
1,60cm
0,80cm
0,40cm
18,0 km/h = 5 m/s
8,33cm
5,00cm
4,00cm
2,00cm
1,00cm
0,50cm
21,6 km/h = 6 m/s
10,00cm
6,00cm
4,80cm
2,40cm
1,20cm
0,60cm
25,2 km/h = 7 m/s
11,67cm
7,00cm
5,60cm
2,80cm
1,40cm
0,70cm
28,8 km/h = 8 m/s
13,33cm
8,00cm
6,40cm
3,20cm
1,60cm
0,80cm
32,4 km/h = 9 m/s
15,00cm
9,00cm
7,20cm
3,60cm
1,80cm
0,90cm
36,0 km/h = 10 m/s
16,67cm
10,00cm
8,00cm
4,00cm
2,00cm
1,00cm
54,0 km/h = 15 m/s
25,00cm
15,00cm
12,00cm
6,00cm
3,00cm
1,50cm
72,0 km/h = 20 m/s
33,33cm
20,00cm
16,00cm
8,00cm
4,00cm
2,00cm
Dadurch kann die Sensorgröße (CCD Größe) auch nicht mehr als unveränderlich angenommen werden. Der Sensor wird in Richtung der Flugrichtung „länger“. Die Kamerakalibrierung, die auf der Annahme basiert das die Sensorgröße unveränderlich ist, wird deutlich schlechter und es werden dadurch schlechtere Genauigkeiten erzielt. Dieser Effekt kann minimiert werden in dem man so langsam wie möglich fliegt, die Belichtungszeit so kurz wie möglich einstellt und so hoch wie möglich fliegt. Bei Flughöhen von ca. 30m sollte man z.B. nicht schneller als 2m/s fliegen und Belichtungszeiten kürzer als 1/500s einstellen. Dazu wird am besten auch eine ISO Empfindlichkeit von 400 oder höher verwendet damit eine möglichst kurze Belichtungszeit eingestellt werden kann.
Die PMS AG stellt eine Excel Tabelle zur Verfügung mit der ermittelt werden kann welche maximale Geschwindigkeit bei einer gegebenen Flughöhe, Kamera und Belichtungszeit geflogen werden kann damit diese Genauigkeitsverschlechterungen minimiert bzw. vernachlässigt werden können.
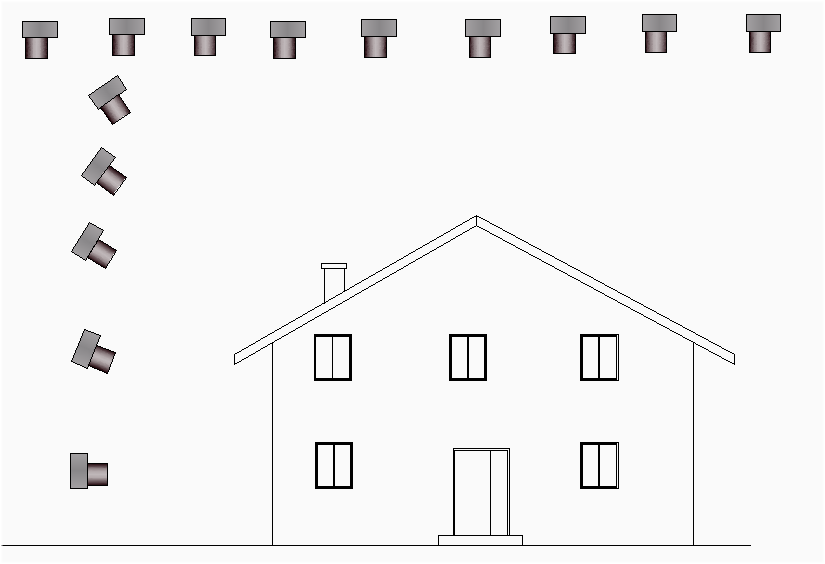
Verknüpfen von Drohnen- und terrestrischen Bildern
Möchte man Drohnenbilder mit Bildern normaler Kameras in einem gemeinsamen Projekt verwenden, so muss der maximal zulässige Konvergenzwinkel von 30° beachtet werden. Die Lösung ist hier einfach mit der Drohne auf- oder abzusteigen und die Kamera mitzuschwenken:
Wird ein größeres Gebiet beflogen so sollte dass mehrfach an verschiedenen Stellen gemacht werden damit es eine gute Verknüpfung zwischen den Drohnenbildern und den terrestrischen Bildern gibt.
Messgenauigkeiten
Generelles
Die Photogrammmetrie unterscheidet sich grundlegend gegenüber anderen Messmethoden wenn man die erreichbaren Genauigkeiten betrachtet: Hier kann man prinzipiell, mit entsprechenden Aufwand, jede beliebige Genauigkeit erreichen.
Oder andersherum betrachtet: Wenn man weiss welche Genauigkeit man benötigt, muss man bei einer gegebenen Kamera/Objektiv Kombination einen maximalen Fotografierabstand einhalten um diese Genauigkeit zu erreichen, oder bei einem gegebenen Fotografierabstand, welche Brennweite das Objektiv und/oder welche Auflösung die Kamera haben muss um diese Genauigkeit zu erreichen.
Faustregeln
Die Genauigkeit die Sie mit ELCOVISION 10 erreichen ist an natürlichen Punkten in etwa die Pixelgrösse am Objekt.
Werden Punkte mit ELCOVISION 10 Zielmarken signalisiert, so wird an diesen Punkten normalerweise eine Genauigkeit im Bereich von 0.1 – 0.01*[Pixelgrösse am Objekt] erreicht, also ca. 10 bis 100 mal genauer als bei natürlichen Punkten.
Je hochwertiger die Kamera-Objektivkombination, umso besser die Bilder, desto besser die Genauigkeiten.
Festbrennweitenobjektive sind lichtstärker als Zoomobjektive. Bei gleichen Lichtverhältnissen kann man daher die Blendenzahl erhöhen, die Bilder werden schärfer, die Genauigkeiten werden besser.
Während des fotografieren sollte nicht herumgezoomt oder umfokussiert werden. Wird das gemacht, so müssen die entsprechenden Bilder durch ELCOVISION 10 simultankalibriert werden und dadurch kann die erreichbare Genauigkeit sinken.
Werden nicht kalibrierte Kameras verwenden so werden die Genauigkeiten je nach Kamera und Aufnahmekonfiguration um den Faktor 1-4 schlechter.
Beispiele für Genauigkeitsabschätzungen bei terrestrischen Bildern
Im Folgenden wird am Beispiel einer ca. 12m breiten Fassade demonstriert wie sich mit der Aufnahmeentfernung der Bildmaßstab oder die Pixelgröße am Objekt verändert und welche Auswirkungen das auf die erreichbare Genauigkeit hat.
Zu viel Umgebung in den Bildern
Die Fassade ist von sehr weit und/oder mit einem Weitwinkelobjektiv aufgenommen. Man sieht sehr viel Umgebung und Himmel was meistens nicht sinnvoll ist.
Kamera Auflösung
12 MPixel 4000*3000 Pixel
24 MPixel 6000*4000 Pixel
36 MPixel 7360 * 4912 Pixel
Fassade im Bild
~ 1200* 800 Pixel
~ 1800 * 1200 Pixel
~ 2200 * 1470 Pixel
Pixelgröße
~ 12m/1200 Pixel = 1cm/Pixel
~ 12m/1800 Pixel = 6mm/Pixel
~ 12m/2200 Pixel = 5mm/Pixel
Genauigkeit
~ 1cm*0.7 = 7mm
~ 6mm*0.7 = 4.2mm
~ 5mm*0.7 = 3.5mm
Bildformatfüllende Aufnahme
Die Fassade ist korrekt bildformatfüllend aufgenommen, man sieht nicht viel von der Umgebung.
Kamera Auflösung
12 MPixel 4000*3000 Pixel
24 MPixel 6000*4000 Pixel
36 MPixel 7360 * 4912 Pixel
Fassade im Bild
~ 3500 * 2330 Pixel
~ 5250* 3500 Pixel
~ 6440 * 4230 Pixel
Pixelgröße
~ 12m/3500 Pixel = 3.5mm/Pixel
~ 12m/ 5250 Pixel = 2.2mm/Pixel
~ 12m/6440 Pixel = 1.8mm/Pixel
Genauigkeit
~ 3.5mm*0.7 = 2.5mm
~ 2.2mm*0.7 = 1.5mm
~ 1.8mm*0.7 = 1.3mm
Detailaufnahmen
Es ist nur noch ein Teil von ca. 4*3m von der Fassade aufgenommen.
Kamera Auflösung
12 MPixel 4000*3000 Pixel
24 MPixel 6000*4000 Pixel
36 MPixel 7360 * 4912 Pixel
Pixelgröße
~ 4m/4000 Pixel = 1mm/Pixel
~ 4m/ 6000 Pixel = 0.6mm/Pixel
~ 4m/7360 Pixel = 0.5mm/Pixel
Genauigkeit
~ 1mm*0.7 = 0.7mm
~ 0.6mm*0.7 = 0.42mm
~ 0.5mm*0.7 =0.35mm
Referenzstrecken für Lokale Koordinatensysteme
Wenn später ein Lokales Koordinatensystem verwendet werden soll muss mindestens eine Referenzstrecke am Objekt oder in der Nähe gemessen werden. Damit allfällige Fehler wie falsche Messungen, Zahlendreher beim aufschreiben der Distanz von ELCOVISION 10 erkannt werden können, sollten mindestens 2 besser 3 Referenzstrecken gemessen werden.
Streckenmessungen mit Maßband, DISTO, Meterstab
Die Strecken sollten in der Größenordnung des Objektes sein damit keine Fehlerextrapolation auftritt:
So sollte man es nicht machen
Kurze Referenzstrecke ca. 0.5m an einem Fenster, Fassade ca. 12m Breite. 1mm Fehler in der Referenzstrecke extrapoliert auf 1mm*12/0.5 = 2.4cm auf die Breite der Fassade!
So ist es ideal
Referenzstrecke über die gesamte Fassadenbreite, dadurch keine Fehlerextrapolation, der Fehler wird nach innen sogar kleiner:
Nivellierlatten als Referenzstrecken
Nivellierlatten sind ideale Referenzstrecken für kleinere Objekte wie Einfamilienhäuser. Es sollten ebenfalls mehrere Latten verwenden werden, damit eventuelle Probleme durch schlechte Sichtbarkeit vermieden werden können. Wichtig ist folgendes:
Latten voll ausziehen!
Sichtbarkeit beider Enden der Latte beachten!
Unteres Ende der Nivellierlatte durch Gras verdecktBeide Enden der Nivellierlatte sind gut sichtbar
Genauigkeiten im Lufbildfall z.B. Drohnenbilder
Im Fall von Luftbildern werden meist die Lagegenauigkeit und die Höhengenauigkeit unterschieden. Dies deshalb weil man normalerweise hauptsächlich Senkrechtaufnahmen und keine Schrägaufnahmen hat.
Die Lagegenauigkeit ist identisch mit der Pixelgrösse am Objekt, und hauptsächlich von der Brennweite und Auflösung der Kamera bestimmt.
Die Höhengenauigkeit ist für praktische Zwecke fast nur von der Flughöhe abhängig. Die Kameraauflösung spielt hier, vorausgesetzt es handelt sich um eine normale oder hochwertige Kamera, kaum eine Rolle, als Faustregel hat man eine Höhengenauigkeit von ca. 0.003*Flughöhe.
Nachfolgend einige Tabellen mit den Typischen Genauigkeiten für Kameras mit verschiedenen Sensoren für verschiedene Brennweiten und Flughöhen, Lagegenauigkeiten sind in kursiver Schrift
APS-C Sensor: ca. 28*19mm; 12 MPixel: 4000*3000 Pixel
Flughöhe
Höhengen.
8 mm Objektiv
15 mm Objektiv
20 mm Objektiv
30 mm Objektiv
10 m
0.3 cm
0.61 cm
0.33 cm
0.25 cm
0.16 cm
15 m
0.5 cm
0.92 cm
0.49 cm
0.37 cm
0.25 cm
20 m
0.7 cm
1.23 cm
0.65 cm
0.49 cm
0.33 cm
30 m
1.0 cm
1.84 cm
0.98 cm
0.74 cm
0.49 cm
40 m
1.3 cm
2.45 cm
1.31 cm
0.98 cm
0.65 cm
50 m
1.7 cm
3.06 cm
1.63 cm
1.23 cm
0.82 cm
60 m
2.0 cm
3.68 cm
1.96 cm
1.47 cm
0.98 cm
80 m
2.6 cm
4.90 cm
2.61 cm
1.96 cm
1.31 cm
100 m
3.3 cm
6.13 cm
3.27 cm
2.45 cm
1.63 cm
120 m
4.0 cm
7.35 cm
3.92 cm
2.94 cm
1.96 cm
APS-C Sensor: ca. 28*19mm; 24 MPixel: 6000*4000 Pixel
Flughöhe
Höhengen.
8 mm Objektiv
15 mm Objektiv
20 mm Objektiv
30 mm Objektiv
10 m
0.3 cm
0.41 cm
0.22 cm
0.16 cm
0.11 cm
15 m
0.5 cm
0.61 cm
0.33 cm
0.25 cm
0.16 cm
20 m
0.7 cm
0.82 cm
0.44 cm
0.33 cm
0.22 cm
30 m
1.0 cm
1.23 cm
0.65 cm
0.49 cm
0.33 cm
40 m
1.3 cm
1.63 cm
0.87 cm
0.65 cm
0.44 cm
50 m
1.7 cm
2.04 cm
1.09 cm
0.82 cm
0.54 cm
60 m
2.0 cm
2.45 cm
1.31 cm
0.98 cm
0.65 cm
80 m
2.6 cm
3.27 cm
1.74 cm
1.31 cm
0.87 cm
100 m
3.3 cm
4.08 cm
2.18 cm
1.63 cm
1.09 cm
120 m
4.0 cm
4.90 cm
2.61 cm
1.96 cm
1.31 cm
Vollformat Sensor: ca. 36*24mm; 24 MPixel: 6000*4000 Pixel
Flughöhe
Höhengen.
8 mm Objektiv
15 mm Objektiv
20 mm Objektiv
30 mm Objektiv
10 m
0.3 cm
0.51 cm
0.27 cm
0.21 cm
0.14 cm
15 m
0.5 cm
0.77 cm
0.41 cm
0.31 cm
0.21 cm
20 m
0.7 cm
1.03 cm
0.55 cm
0.41 cm
0.27 cm
30 m
1.0 cm
1.54 cm
0.82 cm
0.62 cm
0.41 cm
40 m
1.3 cm
2.05 cm
1.09 cm
0.82 cm
0.55 cm
50 m
1.7 cm
2.56 cm
1.37 cm
1.03 cm
0.68 cm
60 m
2.0 cm
3.08 cm
1.64 cm
1.23 cm
0.82 cm
80 m
2.6 cm
4.10 cm
2.19 cm
1.64 cm
1.09 cm
100 m
3.3 cm
5.13 cm
2.73 cm
2.05 cm
1.37 cm
120 m
4.0 cm
6.15 cm
3.28 cm
2.46 cm
1.64 cm
Vollformat Sensor: ca. 36*24mm; 36MPixel: 7360*4900 Pixel
Flughöhe
Höhengen.
8 mm Objektiv
15 mm Objektiv
20 mm Objektiv
30 mm Objektiv
10 m
0.3 cm
0.43 cm
0.23 cm
0.17 cm
0.11 cm
15 m
0.5 cm
0.64 cm
0.34 cm
0.26 cm
0.17 cm
20 m
0.7 cm
0.86 cm
0.46 cm
0.34 cm
0.23 cm
30 m
1.0 cm
1.28 cm
0.68 cm
0.51 cm
0.34 cm
40 m
1.3 cm
1.71 cm
0.91 cm
0.68 cm
0.46 cm
50 m
1.7 cm
2.14 cm
1.14 cm
0.86 cm
0.57 cm
60 m
2.0 cm
2.57 cm
1.37 cm
1.03 cm
0.68 cm
80 m
2.6 cm
3.42 cm
1.83 cm
1.37 cm
0.91 cm
100 m
3.3 cm
4.28 cm
2.28 cm
1.71 cm
1.14 cm
120 m
4.0 cm
5.14 cm
2.74 cm
2.05 cm
1.37 cm
Drohnen GPS Genauigkeiten
Die meisten Drohnen sind mit GPS ausgestattet. Allerdings sind nur Drohnen mit einem sogenannten RTK-GPS (Real Time Kinematic) für Vermessungszwecke wirklich geeignet: Die Positionsgenauigkeit herkömmlicher Drohnen-GPS liegt im Bereich von 1 bis 10 Metern und ist somit für die Vermessung nahezu unbrauchbar. RTK-GPS hingegen bieten eine wesentlich höhere Präzision, typischerweise im Bereich von 1 bis 10 Zentimetern. Dies ist in vielen Fällen ausreichend, jedoch gibt es Situationen, in denen selbst diese Genauigkeit nicht genügt. Ein stark vereinfachtes Beispiel soll dies verdeutlichten:
2 Drohnenpositionen mit GPS Genauigkeit R, nicht maßstäblich
Die GPS-Genauigkeit R sei 10 cm. Der tatsächliche Abstand D zwischen den beiden Drohnenpositionen sei 20 m. In den ungünstigsten Fällen können die GPS-Distanzen wie folgt variieren:
In diesem Fall beträgt der maximale Skalierungsfehler 2%. Das bedeutet, dass ein 10 m langer Abschnitt im überflogenen Gebiet einen Messfehler von bis zu ± 10cm aufweisen kann.
Als Lösung bieten sich folgende Ansätze an:
Eine deutlich größere Fläche abfliegen: Da GPS-Positionsfehler zufällig verteilt sind, gleichen sie sich über eine größere Fläche weitgehend aus, die Skalierungsfehler gehen deutlich zurück, oftmals auf < 5mm auf 10m
Die GPS-Koordinaten bei kleinen Objekten nicht verwenden und stattdessen genaue Strecken für die Skalierung nutzen, wie in diesem Beispiel beschrieben: Kurzanleitung Drohne Dachvermessung
Verwenden Sie 5-8 Passpunkte die mit einem Vermessungs-GPS oder einer Totalstation eingemessen wurden. Diese können dann als Passpunkte für die Transformation verwendet werden.
Fotos oder Videos?
Antwort: Fotos! Man sollte Videos wenn irgendwie möglich nicht verwenden!
Videos haben folgende Nachteile gegenüber Fotos:
Geringere Auflösung:
Dadurch automatisch schlechtere Genauigkeit da die Pixelgröße am Objekt größer ist. Siehe dazu weiter oben die Diskussion über „Beispiele für Genauigkeitsabschätzungen bei terrestrischen Bildern“
Rolling Shutter Effekt:
Wenn Fotos aufgenommen werden wird bei den meisten höherwertigen Kameras der Sensor zu einem Zeitpunkt belichtet. Bei Videos wird der Bildsensor der Kamera jedoch fortlaufend zeilenweise ausgelesen. Wenn sich die Kamera bewegt wird dadurch das resultierende Bild „verbogen“, da zum Zeitpunkt an dem die letzte Zeile ausgelesen wird, sich der Bildsensor von der Position als die erste Zeile ausgelesen wurde, entfernt hat. Dadurch werden genaue Messungen fast unmöglich gemacht, da das Bild durch diesen Rolling Shutter Effekt irgendwie verbogen wird:
Durch schnelle Kamerabewegung verursachter Rolling Shutter Effekt verbogenes Bild
Diese Website verwendet Cookies
Wählen Sie über die unten stehenden Kontrollkästchen aus, welche Cookies Sie zulassen möchten. Unsere Website verwendet Cookies, um den Datenverkehr und die Nutzeraktivitäten auf unserer Website zu untersuchen, für Marketingzwecke und zur Bereitstellung von Social-Media-Funktionen. Mehr Details...
Cookie-Einstellungen
Wir verwenden Cookies, um Ihr Surferlebnis zu verbessern, personalisierte Werbung oder Inhalte zu präsentieren und unseren Datenverkehr zu analysieren. Wenn Sie auf "Alle akzeptieren" klicken, stimmen Sie unserer Verwendung von Cookies zu. Mehr Details...