Manuelle Bildmessmethoden
Entzerrung
Messprinzip
In einem Bild wird eine plane Entzerrungsebene definiert. Diese Ebene beschreibt die Transformation der Bildkoordinaten in ein lokales Koordinatensystem der Entzerrungsebene. Bei der Entzerrungsmessung werden eigentlich 2D Koordinaten gemessen.
Durch eine räumliche Lagerung der Entzerrungsebene, z.B. durch die Definition über Objektpunkte, erhält man Koordinaten im Objektkoordinatensystem, also 3D Koordinaten.
Voraussetzungen
- Bild einer beliebigen Kamera
- Mindestens eine definierte Entzerrungsebene in dem verwendeten Bild
Erreichbare Genauigkeit
Sehr Hoch - Hoch - Mittel - Gering
Automatische Erkennung von Messfehlern
Nicht möglich
Mögliche Fehlerquellen
- Schlechte Aufnahmekonfigurationen.
- Die Entzerrungsebene entspricht nicht der gewollten Auswerteebene.
Einbild- oder Monobildmessung
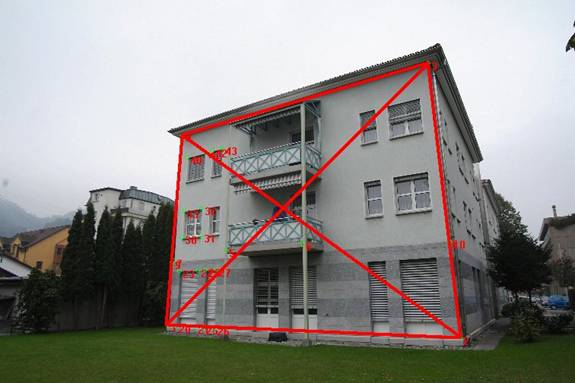
Messprinzip
Der Messstrahl einer Bildmessung wird mit einer 3D Ebene geschnitten. Die Definition der dieser Ebene erfolgt vorab über mindestens 3 Punkte. Wird eine Ebene mit mehr als 3 Punkten bestimmt, so wird eine ausgeglichene Ebene ermittelt.
Die Koordinaten des Durchstoßpunktes des Messstrahles durch die definierte Ebene werden als 3D-Punktkoordinaten bewertet.
Voraussetzungen
- Orientierte Bilder einer Messkamera oder simultankalibrierte Bilder einer beliebigen Kamera
- Eine 3D Ebene
Erreichbare Genauigkeit
Sehr Hoch - Hoch - Mittel - Gering
Automatische Erkennung von Messfehlern
Nicht möglich
Mögliche Fehlerquellen
- Die Messebene entspricht nicht der gewünschten Auswerteebene: z.B. bei einer leicht gewölbte Fassade
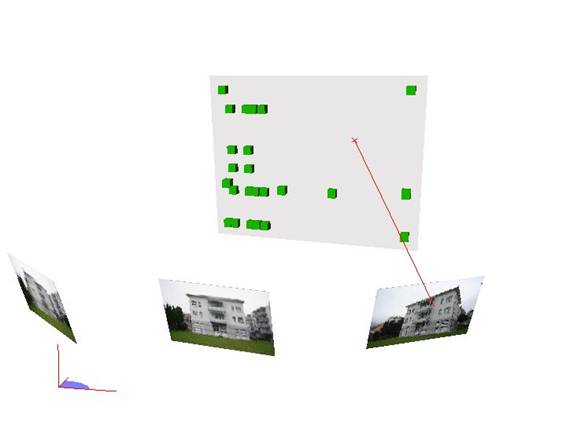
Zweibildmessung
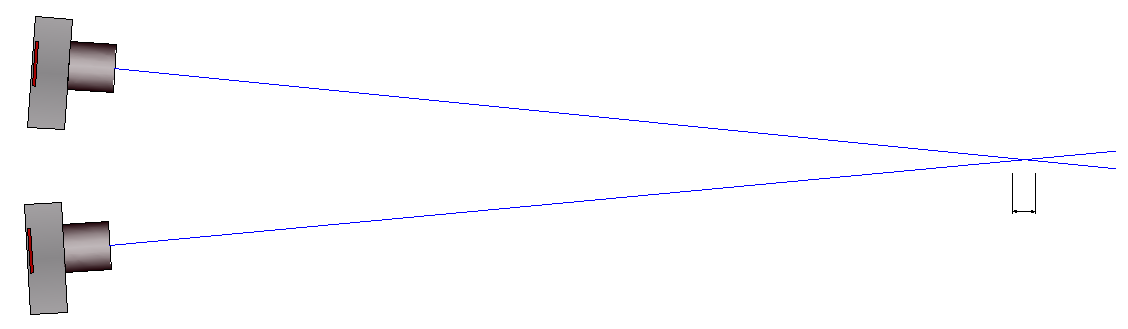
Messprinzip
Die beiden Messstrahlen aus den Messungen zweier Bilder werden im Raum geschnitten und ergeben so einen 3D-Punkt.
Mit den beiden Messstrahlen wird ein ausgeglichener Vorwärtsschnitt berechnet.
Voraussetzungen
- Orientierte Bilder einer Messkamera oder simultankalibrierte Bilder einer beliebigen Kamera
Erreichbare Genauigkeit
Sehr Hoch - Hoch - Mittel - Gering
Automatische Erkennung von Messfehlern
Möglich über die Berechnung des Punktfehlers. Die fehlerhafte Messung kann allerdings nicht automatisch gefunden werden.
Die Messung selbst wird durch das Einblenden einer sogenannten Epipolarlinie in die Bilder unterstützt.
Mögliche Fehlerquellen
- Sind Bildstandpunkte sehr nahe zusammen, kann es dann durch den schleifenden Strahlenschnitt zu einer schlechten Genauigkeit in Blickrichtung führen:
Mehrbildmessung
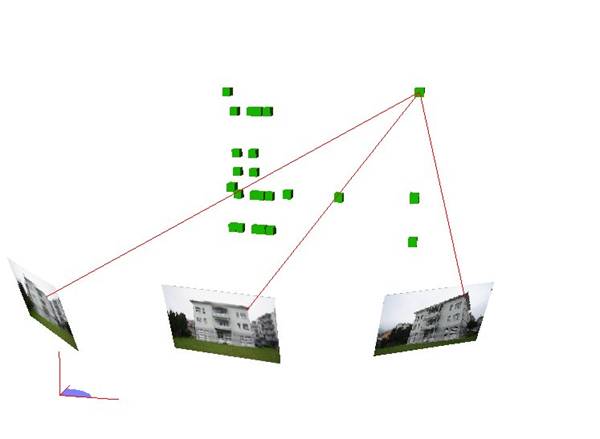
Messprinzip
Alle Messstrahlen werden miteinander im Raum geschnitten und ergeben so den 3D-Punkt. Je mehr Messungen gemacht werden, umso genauer kann der Punkt im Raum bestimmt werden.
Mit allen Messstrahlen wird ein ausgeglichener Vorwärtsschnitt berechnet.
Voraussetzungen
- Orientierte Bilder einer Messkamera oder simultankalibrierte Bilder einer beliebigen Kamera
Erreichbare Genauigkeit
Sehr Hoch - Hoch - Mittel - Gering
Automatische Erkennung von Messfehlern
Möglich über die Berechnung des Punktfehlers. Ab 3 Bildmessungen können die fehlerhaften Messungen automatisch gefunden werden.
Die Messung selbst wird durch das Einblenden einer sogenannten Epipolarlinie in die Bilder unterstützt.